
Publications

Segmenting Unknown 3D Objects from Real Depth Images using Mask R-CNN Trained on Synthetic Point Clouds
Michael Danielczuk, Matthew Matl, Saurabh Gupta, Andrew Li, Andrew Lee, Jeffrey Mahler, Ken Goldberg
To appear in IEEE International Conference on Robotics and Automation (IRCA), 2019.
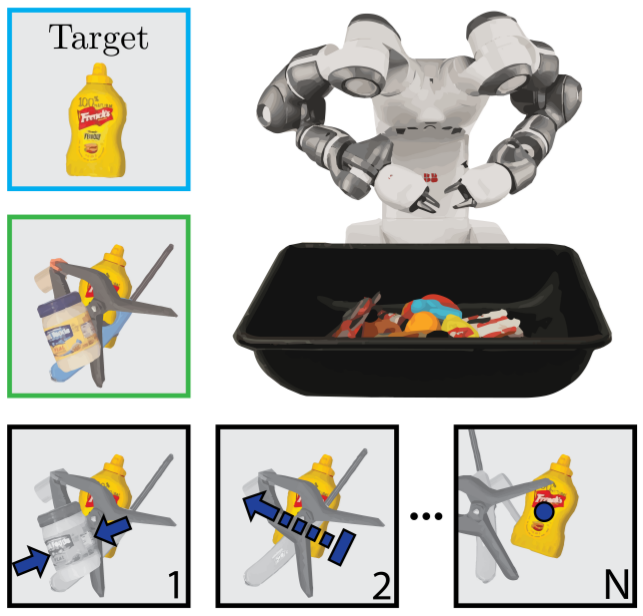
Mechanical Search: Multi-Step Retrieval of a Target Object Occluded by Clutter
Michael Danielczuk, Andrey Kurenkov, Ashwin Balakrishna, Matthew Matl, Roberto Martin-Martin, Animesh Garg, Silvio Savarese, Ken Goldberg
To appear in IEEE International Conference on Robotics and Automation (IRCA), 2019.
Learning Ambidextrous Robot Grasping Policies
Jeffrey Mahler, Matthew Matl, Vishal Satish, Michael Danielczuk, Bill DeRose, Stephen McKinley, Ken Goldberg
Science Robotics, 2019.
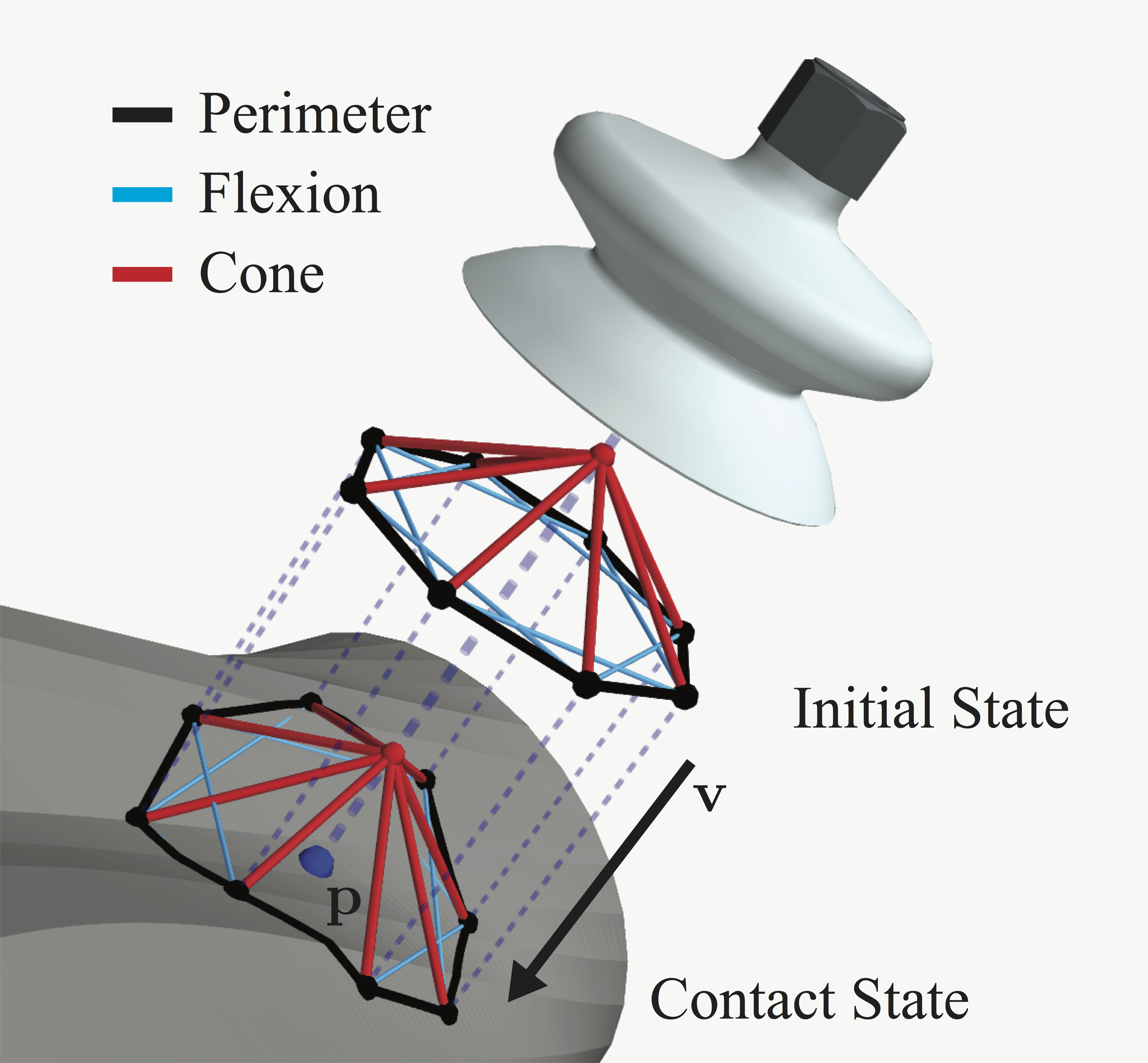
Dex-Net 3.0: Computing Robust Robot Suction Grasp Targets using a New Analytic Model and Deep Learning
Jeffrey Mahler, Matthew Matl, Xinyu Liu, Albert Li, David Gealy, Ken Goldberg
IEEE International Conference on Robotics and Automation (IRCA), 2018.
[PDF] [Supplement] [Extended Version] [Bibtex]
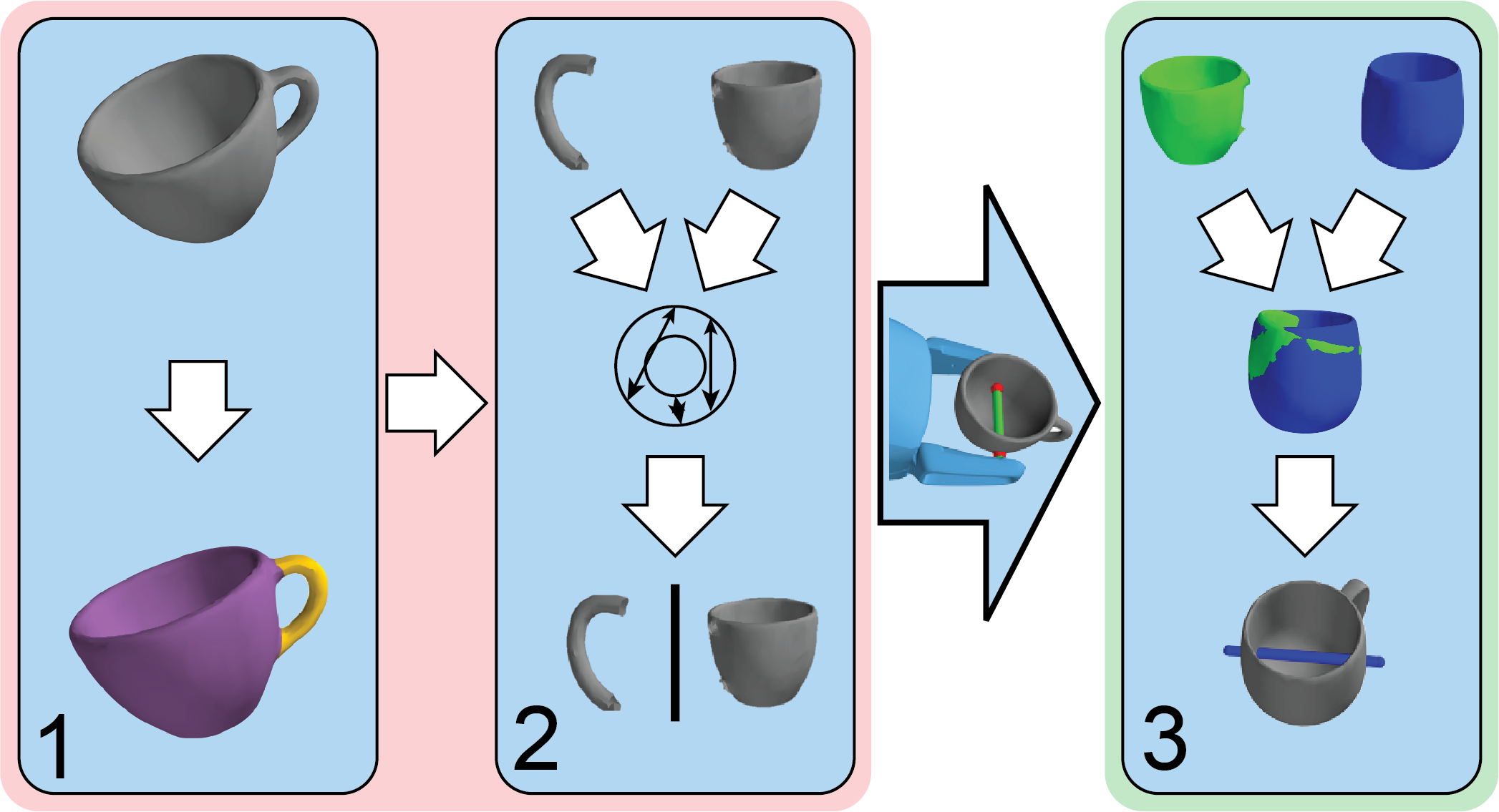
An Algorithm for Transferring Parallel-Jaw Grasps Between 3D Mesh Subsegments
Matthew Matl, Jeffrey Mahler, Ken Goldberg
IEEE International Conference on Automation Science and Engineering (CASE), 2017.
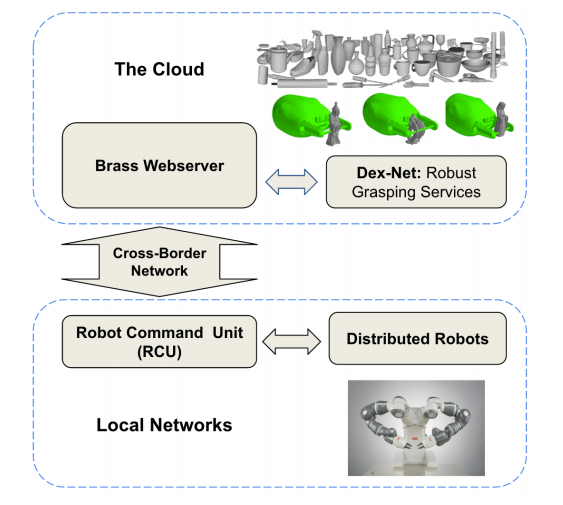
A Cloud Robot System using the Dexterity Network and Berkeley Robotics and Automation as a Service (BRASS)
Nan Tian*, Matthew Matl*, Jeffrey Mahler, Yu Xiang Zhou, Samantha Staszak, Christopher Correa, Steven Zheng, Qiang Li, Robert Zhang, Ken Goldberg
IEEE International Conference on Robotics and Automation (ICRA), 2017.
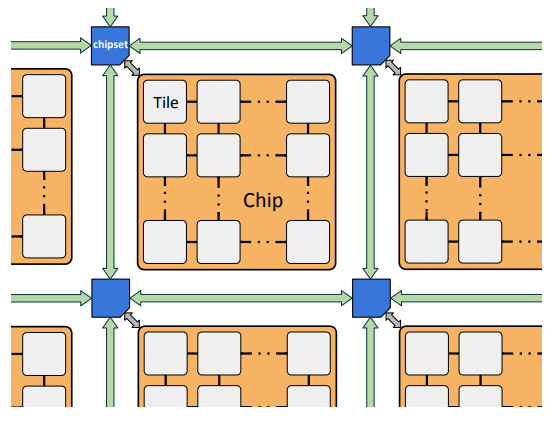
OpenPiton: An Open Source Manycore Research Framework
Jonathan Balkind, Michael McKeown, Yaosheng Fu, Tri Nguyen, Yanqi Zhou, Alexey Lavrov, Mohammad Shahrad, Adi Fuchs, Samuel Payne, Xiaohua Liang, Matthew Matl, David Wentzlaff
ACM SIGOPS Operating Systems Review, 2016.